-
Hashtag= #openROV
Background:
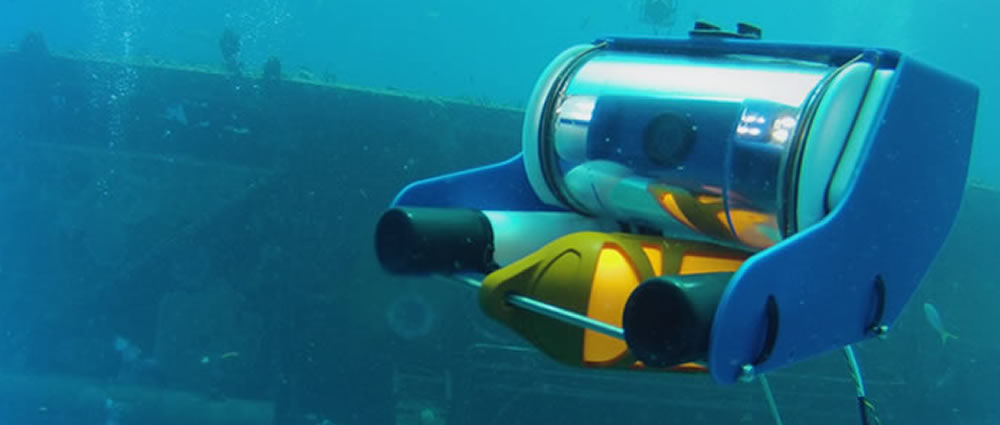
OpenROV is a Do It Yourself telerobotics community centered around underwater exploration and education. The "remotely operated vehicle" itself a low-cost telerobotic submarine that can be built with mostly off-the-shelf parts. The goal of OpenROV is to democratize exploration by allowing anyone to explore and study underwater environments. The OpenROV community is also laying the foundation for globally-connected citizen scientists to share their data and findings.
Challenge Description:
Design and test an interface that allows control of an OpenROV from distance of more than 50 miles away.
Functional Specifications:
- Currently the design incorporates command and control, and visual feedback via an ethernet over hardline technology to communicate from the ROV to the user, who remains above the surface of the water. However, there is no reason, with the proper connectivity and interfaces, that command and control could be performed by a user across the planet rather than tens of meters away on a boat or shore. The 50-mile suggestion is to encourage collaboration with sites other than San Francisco, where an OpenROV will be read and waiting to be commanded from afar.
- Control the ROV from more than 50 miles away.
- Provide visual feedback via a graphical user interface and video.
- Incorporate predictive indications for any known or detected delays in communications.
- Test functionality during the SpaceApps weekend.
- Allow a "view-only" mode which allows anyone in the world to look over the shoulder of the explorers, without disrupting piloting of the ROV.
- Use this collaborative technology to develop and test any other functionality of an ROV, proving that remote operation can apply to the development process as well.
Datasets
Create Project Solving this Challenge
Need help?
Check out the comments to chat with other users working on this challenge or email the challenge creator with any questions.
-
The following projects are solving this challenge:
-
ESCOM openRov
Dar solución al desafio OPENROV mediante los conocimientos adquiridos en la universidad "ESCOM" Visit Project
-
OpenROV Internet Control
Create a software to make it possible to control a ROV over the internet. There is a Google hangout running from Brisbane right now. (see link below) Visit Project
-
Mobile Visual Interface
Our project is to have an augmented reality style camera control for OpenRov. The application is made for Windows phone. We will use the windows phone gyroscope to control the webcam of the OpenRov robot. The project will contain client application to the control camera data. We have also made a ... Visit Project
-
Controlling OpenROV using Leap Motion Gesture Sensor and Arduino
To build glue code that interconnects the Leap SDK to Arduino through TCP sockets. Visit Project
-
OpenROV Leap Motion Robotic Arm Control - San Francisco
We want to make underwater exploration and manipulation accessible to anyone. Part of that goal is making the interface to control the ROV as intuitive as possible, especially in controlling the manipulator arm. We've created a prototype for how this type of manipulator could work using the Leap ... Visit Project
-
OpenROV Command Center
# Overview [OpenROV Command Center - Presentation](http://prezi.com/rsblwp09dkmt/openrov-command-center/?kw=view-rsblwp09dkmt&rc=ref-11760541) The OpenROV Command Center provides a means by which an OpenROV craft can be controlled remotely over the Internet. The key characteristics of the C... Visit Project
-
Leap Motion Open ROV Controller for Europa
A future planning navigation controller using the Leap Motion for the control of the Open ROV on Jupiter's moon Europa. This project includes code to control a robotic arm using the Leap Motion controller. Special thanks to Eric Stackpole and David Lang from OpenROV and Elizabeth Ruscitto fro... Visit Project
-
Tiny Sea Bots
--- Tiny Sea Bots is a platform for people to explore the waters anywhere in the world from the internet. The Tiny Sea Bots platform allows an OpenRov to be internet accessible for the first time ever. Now, anyone in the world can view a robot's live underwater video stream and control the rob... Visit Project
-
OpenROV
Loading...
×
Loading...
×